|
Источник: И.В.Макаров "Основы судовождения"
приборы и инструменты, используемые в судовождении
§ 8. МАГНИТНЫЕ
КОМПАСЫ
§ 9. МЕХАНИЧЕСКИЕ
ЛАГИ
§ 10. РУЧНОЙ ЛОТ
§ 11. Гирокомпасы
§ 12. ПРИБОРЫ,
РАБОТАЮЩИЕ ОТ ГИРОКОМПАСА
§ 13. ЭХОЛОТЫ
§ 14.
ГИДРАВЛИЧЕСКИЕ ЛАГИ
§ 15.
РАДИОНАВИГАЦИОННЫЕ ПРИБОРЫ
Морские магнитные компасы — основные навигационные, приборы
(несмотря на наличие гирокомпасов), которые служат для
определения курса судна и направлений на береговые предметы
и небесные светила. По компасу можно также определить
приближенное направление ветра и дрейфа судна.
Магнитные компасы просты по устройству и в то же время
безотказны в работе. Они не связаны ни с источниками
энергии, ни с какими-либо другими приборами, и к тому же их
стоимость относительно небольшая. Все морские суда
снабжаются магнитными компасами, независимо от наличия на
них гирокомпасов.
Магнитный компас работает на основе свойства намагниченной
стрелки располагаться своей осью вдоль магнитных силовых
линий магнитного поля Земли; следовательно, стрелка компаса
должна показывать направление магнитного меридиана в данной
точке на поверхности Земли. В связи с тем что на магнитную
стрелку компаса, установленного на судне, действуют
магнитные поля Земли и судового железа, ось магнитной
стрелки или линия
NS
картушки магнитного компаса располагается в плоскости
компасного меридиана.
По назначению морские магнитные компасы делятся на главные и
путевые.
Главный магнитный компас,
как об этом говорит само название, является наиболее важным
навигационным прибором, который обычно устанавливают на
верхнем мостике в диаметральной плоскости судна в возможной
удаленности от влияния судового железа, что обеспечивает
наиболее оптимальные условия работы компаса. По главному
компасу судоводитель назначает заданный курс, проверяет
показания путевого компаса и гирокомпаса, пеленгует
береговые объекты для определения места.
Путевой магнитный компас
служит как указатель курса и, как правило, устанавливается в
рулевой рубке перед рулевым.
В настоящее время все отечественные суда снабжаются
127-миллиметровым морским магнитным компасом. Он обладает
достаточной точностью и надежностью показаний, прост в
использовании, обслуживании и ремонте.
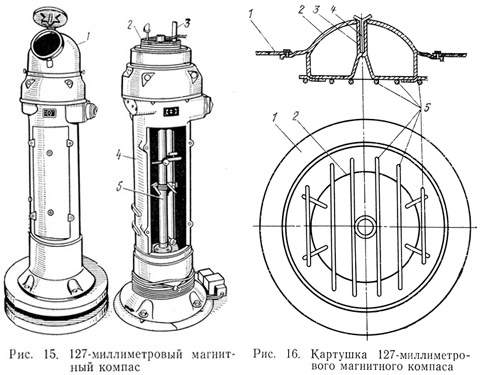 Морской
магнитный 127-миллиметровый компас
(рис. 15) состоит из следующих основных частей: защитного
колпака 1, котелка 2 с картушкой, пеленгатора
3, нактоуза 4 и девиационного прибора 5. Морской
магнитный 127-миллиметровый компас
(рис. 15) состоит из следующих основных частей: защитного
колпака 1, котелка 2 с картушкой, пеленгатора
3, нактоуза 4 и девиационного прибора 5.
Картушка
(рис. 16) является главной частью компаса и состоит из
системы магнитных стрелок 5, поплавка с латунным
ободком 2, агатовой топки 3, винта 4
для крепления топки, диска 1 со шкалой, разбитой на
румбы и градусы.
Магнитная система картушки собрана из шести стрелок круглого
сечения диаметром, равным 2,5 мм. Стрелки делаются попарно
одинаковыми по длине, чтобы концы всех стрелок находились на
одной окружности. Для предохранения от ржавчины магнитные
стрелки помещают в герметически запаянные медные пенальчики.
Поплавок изготавливают из тонкой листовой латуни, он имеет
форму полусферы. Обладая запасом плавучести, он значительно
уменьшает массу картушки в .компасной жидкости, а
следовательно и давление картушки на поддерживающую ее
шпильку. Масса картушки в компасной жидкости равна 4±0,5
г, а в воздухе —105 г. Топку изготовляют цилиндрической
формы из агата. Снизу в топке делают углубление, которым она
надевается на острие компасной шпильки. Топка крепится
винтом в сквозном отверстии поплавка. В нижней части
отверстие имеет расширение для того, чтобы картушка могла
наклоняться при качке судна. Диск изготовляют из тонкой
листовой слюды и на него наклеивают бумажную градуированную
шкалу.
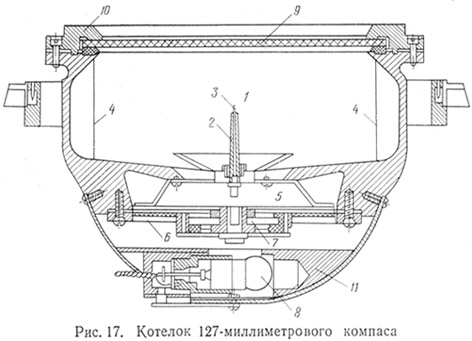 Котелок
(рис. 17) представляет собой латунный цилиндрический
резервуар, разделенный внутри горизонтальной переборкой
на
две камеры и заполненный компасной жидкостью. В верхней
основной камере 1 установлена конусовидная латунная
колонка 2 с компасной шпилькой 3, на которую
надевается своей топкой картушка. На верхний конец шпильки
напаивают кусочек очень прочного металла — ирридия или
стеллита. Внутри верхней камеры установлены носовая и
кормовая курсовая нити 4 из вычерненной латунной
проволоки. При установке котелка на судне они должны
располагаться в диаметральной плоскости судна. Носовая
курсовая нить является индексом для отсчета курса судна. Котелок
(рис. 17) представляет собой латунный цилиндрический
резервуар, разделенный внутри горизонтальной переборкой
на
две камеры и заполненный компасной жидкостью. В верхней
основной камере 1 установлена конусовидная латунная
колонка 2 с компасной шпилькой 3, на которую
надевается своей топкой картушка. На верхний конец шпильки
напаивают кусочек очень прочного металла — ирридия или
стеллита. Внутри верхней камеры установлены носовая и
кормовая курсовая нити 4 из вычерненной латунной
проволоки. При установке котелка на судне они должны
располагаться в диаметральной плоскости судна. Носовая
курсовая нить является индексом для отсчета курса судна.
Нижняя, или дополнительная, камера 5 служит для
компенсации объема компасной жидкости при изменении
температуры. Верхняя камера соединена с нижним отверстием,
через которое перетекает компасная жидкость при ее сжатии
или расширении. Дном нижней камеры является гибкая из
гофрированной латуни диафрагма 6.
Изменение объема в основной камере компенсируется изменением
объема с помощью диафрагмы в дополнительной камере, В
среднюю часть диафрагмы вставлено стекло 7, толщиной
5 мм.
Находящаяся в донной части котелка электрическая лампочка
8 освещает в темное время суток через это стекло
картушку компаса. Котелок закрыт толстым зеркальным стеклом
9, диаметром 177 мм и толщиной 5,5 мм, установленным
на резиновой прокладке. Стекло крепится латунным
азимутальным кольцом 10, на котором нанесена шкала
(от 0 до 360°) для определения при помощи пеленгатора
курсовых углов. Нулевое деление шкалы азимутального круга
обращено к корме и сдвинуто относительно диаметральной
плоскости судна на угол 30°, по часовой стрелке. Это связано
с тем, что индекс пеленгатора также сдвинут на 30° из-за
предметной и глазной мишеней, закрывающих деления
азимутальной шкалы. Котелок помещен в кардановое кольцо для
сохранения горизонтального положения во время качки. Снизу к
корпусу котелка крепится латунная чашка со свинцовым
грузом-поддоном 11. Груз служит для понижения центра
тяжести котелка и уменьшения его колебаний во время качки
судна.
Компасная жидкость доливается в котелок через специальное
отверстие в его боковой стенке. Для хранения и
транспортировки котелка в комплекте компаса имеется
специальный ящик.
Нактоуз
(см. рис. 15) предназначен для установки котелка компаса и
девиационного прибора. Изготовляется из сплава кремния с
алюминием (силумина). Состоит нактоуз из корпуса, нижнего и
верхнего оснований, амортизирующего подвеса, девиационного
прибора и защитного колпака. Корпусом является полый
цилиндр, опирающийся на фланцевидное основание с отверстиями
для крепления нактоуза к палубе судна. У верхнего основания,
которое может поворачиваться (для этого надо отдать гайки
болтов, которыми оно крепится к корпусу), имеется
цилиндрическая шейка, внутри которой находится
амортизирующий подвес (для уменьшения действия вибрации на
котелок компаса), состоящий из массивного металлического
кольца и двух гнезд для осей карданова кольца котелка.
Верхнее основание может поворачиваться на 12° в ту и другую
сторону, для чего надо отдать четыре болта, крепящие
основание к корпусу, и повернуть его.
Девиационный прибор
(см. рис. 15) помещается внутри корпуса нактоуза. Основная
часть прибора — вертикальная латунная труба с двумя
вертикальными пазами, один из которых расположен в
продольной, а другой — в поперечной плоскости компаса. В эти
пазы устанавливаются две каретки с магнитами-уничтожителями.
В одной каретке размещаются продольные, а в другой
поперечные магниты. Подбирая соответствующие по величине
магниты и перемещая каретки вверх и вниз по трубе,
добиваются, чтобы их воздействие на стрелки компаса было
равно и противоположно воздействию магнитного поля судового
железа. Таким образом производится уничтожение девиации.
Внутри девиационной трубы на тросике подвешивается креповой
магнит, предназначенный для уничтожения креновой девиации.
 Защитный колпак
(см рис. 15) служит для предохранения от механических
повреждений котелка компаса, установленного в нактоузе. В
колпаке имеется два окна, через которые можно производить
отсчет курса, не снимая колпака с нактоуза. Защитный колпак
(см рис. 15) служит для предохранения от механических
повреждений котелка компаса, установленного в нактоузе. В
колпаке имеется два окна, через которые можно производить
отсчет курса, не снимая колпака с нактоуза.
Пеленгатор
(рис. 18) служит для определения пеленгов и курсовых углов.
Основанием 1 пеленгатора служит латунное кольцо с
заплечиками для удержания его на азимутальном кольце
компаса. На основании прикреплены глазная мишень 5 с
узкой прорезью и светофильтрами 4 (для прямого
пеленгования Солнца) и предметная мишень 2 с нитью. В
нижней части глазной мишени имеется трехгранная призма,
позволяющая снимать отсчеты пеленгов. В центре основания
пеленгатора расположена съемная чаша 3 для установки
дефлектора — прибора, служащего для измерения магнитных сил,
действующих на магнитную систему компаса (при уничтожении
девиации).
По магнитному компасу определяют: компасный курс судна,
компасный пеленг, курсовые углы, направления ветра и т. д.
Для снятия отсчета компасного курса к компасу подходят со
стороны кормы и замечают деление картушки, приходящееся
против носовой курсовой черты. Точность отсчета курса
составляет 0,2°. При плавании в штормовую погоду, когда
судно рыскает и отсчет против курсовой черты постоянно
меняется, за курс принимается средний из двух крайних
отсчетов.
При взятии пеленга какого-либо предмета пеленгатор поворачивают
так, чтобы нить предметной мишени проходила посередине
пеленгуемого предмета и прорези глазной мишени. В момент совмещения
замечают отсчет пеленга под призмой пеленгатора.
Снятый отсчет является обратным компасным пеленгом (ОКП),
так как он показывает направление от предмета на судно и отличается
от компасного
пеленга на 180°. Компасный пеленг рассчитывают по формуле
 Если ОКП<180°, то берется знак «плюс» (+), если
ОКП>180° — знак «минус» (—). Если ОКП<180°, то берется знак «плюс» (+), если
ОКП>180° — знак «минус» (—).
Для определения курсовых углов так же, как и при
пеленговании, пеленгатор наводят на наблюдаемый предмет, а
отсчет курсового угла снимают с азимутального круга против
индекса у глазной мишени пеленгатора.
Магнитный компас, как и другие навигационные приборы,
нуждается в тщательном
уходе. Котелок компаса следует оберегать от резких -толчков. Его необходимо протирать мягкой чистой ветошью.
Азимутальное кольцо и острия осей карданова подвеса
смазывают тонким слоем технического вазелина. Все части компаса необходимо содержать в чистоте. Когда главный компас не
используется, он
должен быть закрыт защитным колпаком. При стоянке в порту на
него надевают парусиновый чехол. Совершенно недопустимо
какое-либо передвижение специального девиационного железа и
магнитов. Внутри нактоуза нельзя хранить посторонние
предметы.
На судне вследствие отсутствия необходимых условий разбирать
компас не разрешается. Поэтому в судовых условиях обычно
ограничиваются проверкой картушки на застой, и заменой, если
потребуется, компасной шпильки, и проверкой пеленгатора.
Морской магнитный 75-миллиметровый (шлюпочный) компас
(рис. 19) состоит из картушки, котелка, футляра,
осветительного устройства и визира.
Картушка
состоит из двух магнитных компасных стрелок в латунных
пеналах, поплавка, топки и диска со шкалой.
 Котелок
по устройству подобен котелку 127-миллиметрового компаса и
состоит из двух камер, сообщающихся между собой и
заполненных водным раствором этилового спирта. В верхней,
основной, камере помещается на шпильке картушка. У носовой и
кормовой стенок основной камеры соответственно расположены
курсовые нити. Котелок на кардановом подвесе помещен в
коробку, закрывающуюся защитным колпаком с застекленным
вырезом. С правой боковой стенки колпака имеется прилив,
служащий для помещения осветительного масляного фонаря, а к
задней стенке приделан угольник для подвешивания компаса в
шлюпке. Котелок
по устройству подобен котелку 127-миллиметрового компаса и
состоит из двух камер, сообщающихся между собой и
заполненных водным раствором этилового спирта. В верхней,
основной, камере помещается на шпильке картушка. У носовой и
кормовой стенок основной камеры соответственно расположены
курсовые нити. Котелок на кардановом подвесе помещен в
коробку, закрывающуюся защитным колпаком с застекленным
вырезом. С правой боковой стенки колпака имеется прилив,
служащий для помещения осветительного масляного фонаря, а к
задней стенке приделан угольник для подвешивания компаса в
шлюпке.
Компасы с оптической системой передачи показаний
являются наиболее простыми среди дистанционных магнитных
компасов. Основное их достоинство заключается в том, что
чувствительный элемент компаса может быть помещен в любом
наиболее благоприятном для его работы месте, а репитеры
могут быть вынесены всюду, где они нужны. Устройство компаса
КМО-Т (компас магнитный оптический для транспортных судов)
аналогично в принципе устройству 127-миллиметрового
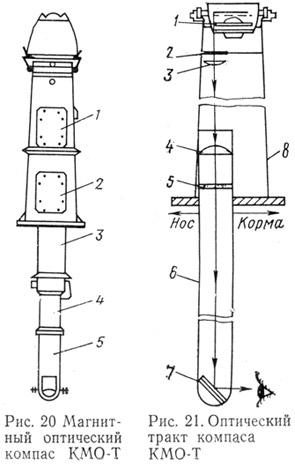
магнитного компаса. На рис. 20 дан общий вид компаса КМО-Т,
где 1 и 2 -верхняя и нижняя крышки нактоуза,
3—неподвижная часть трубы, 4 — верхняя часть
выдвижной трубы и 5 — нижняя часть трубы.
Основное его отличие заключается в оптической системе
компаса, называемой оптическим трактом (рис. 21), который
служат для дистанционной передачи курса и со стоит из
картушки 1, защитного стекла 2, верхней 3
и нижней 4 линз, обогревного устройства (стекла)
5, трубы оптической системы 6, зеркала 7 и
нактоуза 8. На зеркало с помощью линз проектируется
обратная сторона шкалы картушки и курсовой индекс.
Обогревное устройство предназначено для предотвращения
отпотевания и обмерзания линз и защитного стекла. Детали
оптической системы расположены частично в нактоузе,
устанавливаемом на верхнем мостике, частично в специальной
трубе компаса, проходящей через палубу в рулевую рубку.
Недостатком компасов с оптической передачей является то, что
изображение картушки не может быть передано на несколько
репитеров.
Лагами
называются приборы, служащие для измерения скорости судна и
пройденного им расстояния. Механический лаг работает
следующим образом: за кормою судна с помощью лаглиня
буксируется вертушка, вращающаяся под действием на ее
лопасти встречного потока воды. Частота вращения вертушки
зависит от скорости движения судна. Через лаглинь вращение
вертушки передается на счетчик, который показывает скорость
и число пройденных судном миль.
Отечественные заводы выпускают механические забортные лаги
двух типов: лаг ЛЗМ — для измерения скоростей от 5 до 15 уз
и лаг ЛЗБ — для измерения скорости до 25 уз. Они отличаются
друг от друга устройством вертушек и зубчатых передач
счетчика.
Основной частью лага (рис. 22) является вертушка 1,
представляющая собой герметичный, латунный, пустотелый
цилиндр с конусообразным передним концом, который
заканчивается очком для крепления лаглиня. К боковой
поверхности цилиндрической части вертушки на равных
расстояниях друг от друга припаяны четыре лопасти. У лага
ЛЗМ лопасти составляют с осевой линией цилиндра угол 9°, и
за одну пройденную милю вертушка совершает 882 оборота. У
лага ЛЗБ лопасти составляют с осевой линией цилиндра угол
5°, и вертушка совершает 558 оборотов. В очко, имеющееся в
передней части вертушки, вплеснен конец плетеного лаглиня
длиной около 60 см, другой конец которого вплеснивается в
очко соединительной груши 2, которая, в свою очередь,
соединяется с лаглинем 3. Груша служит для надежного
соединения вертушки с лаглинем, а также обеспечивает, в
случае необходимости, быструю замену одной вертушки другой.
Вращение вертушки через лаглинь передается на механический
счетчик пройденного расстояния. Лаглинь изготавливают из
специального плетеного льняного троса, который не должен
закручиваться, диаметром 10 мм. В среднем длина лаглиня
бывает в пределах 70— 100 м. Один конец лаглиня соединен с
грушей, а другой оканчивается плоским латунным гаком,
который соединен со ступицей маховика лага. Маховик 4
предназначен для выравнивания частоты вращения оси счетчика
и поглощения рывков и вибрации лаглиня. Состоит маховик из
обода и ступицы с шестью спицами. На концах ступицы имеются
два очка, в одно из которых запрессовано стальное кольцо, к
которому и крепится гак лаглиня. Во второе очко вплеснен
конец плетеного лаглиня длиной около 50 см с гаком на конце,
которым маховик соединяется с механическим счетчиком.
Механический счетчик 5 помещен в кожух и состоит из
счетного механизма и контактного прибора. Вращение вертушки
через лаглинь передается на валик хвостовой части счетчика,
откуда, в свою очередь, на главную ось счетного механизма,
состоящего из системы, червячных передач и шестеренок.
Механизм счетчика имеет циферблат с тремя шкалами. На
центральной большой шкале отсчитываются целые мили,
пройденные судном (от 0 до 100), на правой малой шкале
отсчитываются десятые доли мили, а на левой малой шкале —
сотни миль (от 100 до 1000). Показания основного
механического счетчика лага передаются на репитер
(электрический счетчик), устанавливаемый в штурманской
рубке. Для этого в механизме основного счетчика имеется
контактный прибор, который через каждые 0,1 мили замыкает и
размыкает цепь постоянного тока, ведущую к репитеру.
Механизм электрического счетчика репитера состоит из
электромагнита и системы шестеренок. Репитер, как и основной
счетчик, имеет аналогичные три циферблата, показывающие
целые мили, десятые доли и сотни миль.
Выпускают лаг за борт сразу после выхода судна в открытое
море. Вертушку лага выбрасывают с подветренного борта, чтобы
при дрейфе судна ее не заносило в кильватерную струю.
Работу по выпуску лага выполняют два матроса: проверяют
исправность лага; вертушка не должна иметь вмятин, погнутых
лопастей, ось хвостовой части счетчика должна вращаться
свободно, без заеданий; затем устанавливают счетчик лага в
башмак так, чтобы штырь башмака заскочил в отверстие на
пятке. В условиях штормовой погоды рекомендуется для
надежности дополнительно закрепить счетчик швертом за
вертикальную стойку. Потом в ушко хвостовой части счетчика
закладывают гак маховика и гак линя — в очко маховика. При
штормовой погоде гак тоже закаболивают. Для подключения
репитеров штепсельную
вилку вставляют в штепсельную коробку и завинчивают крышку
вилки. Затем
осторожно, чтобы вертушка не ударилась о борт
судна, опускают ее до
воды и начинают вытравливать лаглинь,
перебирая его руками.
Перед выпуском лага за борт лаглинь
должен быть уложен на палубе длинной бухтой, так чтобы на
лаглине не образовались
калышки и не перепутались шлаги.
Выпуская за борт лаглинь,
выводят за борт и маховик, придерживая
его руками, чтобы дать небольшую слабину линю, соединяющему
маховик со счетчиком. Когда лаглинь будет вытравлен
почти полностью, один из
матросов, удерживая натянутый лаглинь,
плавно передает его натяжение на маховик, а другой — на
счетчик. После
этого замечают время начала работы лага и его
отсчет.
Сразу после выпуска лага счетчик некоторое время вращается
быстрее обычного, потому что с момента падения вертушки в
воду
и до начала работы счетчика лаглинь успел закрутиться
больше,
чем при нормальной работе лага.
При подходе к порту или к месту якорной стоянки лаг
необходимо убрать. Для уборки лага выделяют также двух
матросов. Один из них начинает выбирать лаглинь, а другой,
отсоединив гак от маховика, переносит конец лаглиня с гаком
на другой борт и стравливает весь лаглинь в воду для
раскручивания. При подъеме вертушки из воды надо следить,
чтобы она не ударилась о борт судна. Подержав некоторое
время лаглинь в воде, чтобы он раскрутился, его быстро
выбирают и укладывают длинной бухтой на палубе. Затем
отсоединяют маховик от счетчика, выключают ток в цепи лага,
вынимают из гнезда штепсельной коробки штепсельную вилку и,
приподняв штырь на башмаке, снимают счетчик. Гнездо
штепсельной коробки закрывают глухой крышкой.
Во время работы лага необходимо постоянно следить за
равномерностью вращения маховика и не реже одного раза за
вахту сличать показания механического счетчика и репитеров.
Через каждые 12 ч непрерывной работы лага хвостовую часть
смазывают специальным маслом. После уборки лага лаглинь
укладывают в длинную бухту и подвешивают для просушки, а
затем убирают в предназначенное для хранения место. Счетчик
и маховик лага насухо вытирают, вертушку промывают пресной
водой и смазывают тонким слоем бескислотного вазелина.
Хранят лаг в специальном футляре.
 Приборы, которые на судах служат для измерения глубин,
называются лотами. Лоты делятся на ручные,
механические и гидроакустические, или эхолоты. Ручным
лотом (рис. 23) измеряют глубину до 50 м при скорости
судна до 5 уз. Ручной лот состоит из свинцовой или чугунной
гири и прикрепленного к гире лотлиня. Гиря имеет форму
пирамиды или конуса высотой 25—30 см и массой 3—5 кг. В
верхней части гиря имеет ушко. В него продевается
проволочная стропка, обшитая кожей, за которую крепится
лотлинь. В нижнем основании гири имеется выемка, заполняемая
смесью сала с толченым мелом или размятым мылом. При касании
лотом дна частицы грунта прилипают к этой массе и по ним
можно судить о характере грунта. Лотлинь имеет длину более
50 м, изготовляется из плетеного линя или несмоленого
пенькового троса прямого спуска окружностью около 25 см.
Разбивка лотлиня начинается от вершины гири. Высота самой
гири в расчет не принимается, так как при определении
глубины она обычно ложится на грунт. Приборы, которые на судах служат для измерения глубин,
называются лотами. Лоты делятся на ручные,
механические и гидроакустические, или эхолоты. Ручным
лотом (рис. 23) измеряют глубину до 50 м при скорости
судна до 5 уз. Ручной лот состоит из свинцовой или чугунной
гири и прикрепленного к гире лотлиня. Гиря имеет форму
пирамиды или конуса высотой 25—30 см и массой 3—5 кг. В
верхней части гиря имеет ушко. В него продевается
проволочная стропка, обшитая кожей, за которую крепится
лотлинь. В нижнем основании гири имеется выемка, заполняемая
смесью сала с толченым мелом или размятым мылом. При касании
лотом дна частицы грунта прилипают к этой массе и по ним
можно судить о характере грунта. Лотлинь имеет длину более
50 м, изготовляется из плетеного линя или несмоленого
пенькового троса прямого спуска окружностью около 25 см.
Разбивка лотлиня начинается от вершины гири. Высота самой
гири в расчет не принимается, так как при определении
глубины она обычно ложится на грунт.
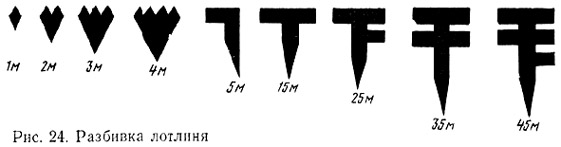
Деления лотлиня обозначают марками из кожи, вырезанными в
виде зубцов, топориков и матерчатых флагдуков (рис. 24). На
советских судах разбивка лотлиня производится в метрических
единицах.
Разбивка лотлиня производится по следующей системе. Десятки
метров обозначаются флагдуками различных цветов: 10 м —
красный флагдук; 20 — синий; 30 — белый, 40 — желтый, 50 —
бело-красный.
Число метров, оканчивающихся цифрой «пять», обозначается
кожаной маркой с топориками: 5м — марка с одним топориком,
15 — с двумя топориками, 25 — с тремя, 35 — с четырьмя, 45 —
с пятью.
В каждой пятерке первый метр обозначается кожаной маркой с
одним зубцом, второй—с двумя зубцами, третий— с тремя,
четвертый — с четырьмя.
Следовательно, 1, 6, 11, 16, 21, 26, 31, 36, 41, 46 м
обозначены марками с одним зубцом; 2, 7, 12, 17, 22, 27, 32,
37, 42, 47 -с двумя зубцами; 3, 8, 13, 18, 23, 28, 33, 38,
43, 48 — с тремя; 4, 9, 14, 19, 24, 29, 34, 39, 44, 49 — с
четырьмя.
 Для того чтобы при дрейфе лотлинь не попал под корпус судна,
лот бросают всегда с наветренного борта. Матрос, встав на
место, набирает в одну руку небольшую бухту лотлиня, ровными
шлагами, наблюдая, чтобы они не перепутались, и лотлинь мог
свободно вытравливаться. Для удобства бросания лота в
лотлинь на расстоянии 2—3 м от вершины гири заделывают
клевант из твердой породы дерева. По команде с мостика
матрос начинает раскачивать лот над водой и затем делает
три-четыре круговых размаха. В тот момент, когда лот, пройдя
нижнюю точку, начнет подниматься, лотовый выпускает клевант.
Лот летит вперед и падает тем дальше, чем сильнее лотовый
раскачал лот перед бросанием. Затем лотовый травит лотлинь
до тех пор, пока лот не достигнет дна. Если лотлиня
вытравлено больше, чем требуется, лотовый быстро подбирает
слабину. Для того чтобы при дрейфе лотлинь не попал под корпус судна,
лот бросают всегда с наветренного борта. Матрос, встав на
место, набирает в одну руку небольшую бухту лотлиня, ровными
шлагами, наблюдая, чтобы они не перепутались, и лотлинь мог
свободно вытравливаться. Для удобства бросания лота в
лотлинь на расстоянии 2—3 м от вершины гири заделывают
клевант из твердой породы дерева. По команде с мостика
матрос начинает раскачивать лот над водой и затем делает
три-четыре круговых размаха. В тот момент, когда лот, пройдя
нижнюю точку, начнет подниматься, лотовый выпускает клевант.
Лот летит вперед и падает тем дальше, чем сильнее лотовый
раскачал лот перед бросанием. Затем лотовый травит лотлинь
до тех пор, пока лот не достигнет дна. Если лотлиня
вытравлено больше, чем требуется, лотовый быстро подбирает
слабину.
Когда судно подойдет к месту бросания лота, лотовый,
заметив, что лотлинь принял вертикальное положение,
приподнимает лот, ударяя гирей о грунт, замечает марку у
воды и докладывает: «Глубина столько-то метров». Если
лотовый не почувствовал удара лота о грунт, значит лот не
достал дна. В этом случае замечают марку у воды и
докладывают: «Пронесло столько-то метров». Ночью лотовый
замечает марку, которая у него в руке, и из этой величины
вычитает высоту надводного борта. После окончания измерения
глубины лотлинь хорошо просушивают и наматывают на
деревянную переносную вьюшку.
Ручной лот до настоящего времени используется на судах. Он
прост и безотказен в эксплуатации, уход за ним заключается в
тщательной просушке лотлиня после его употребления и в
периодической проверке его разбивки. Недостатками ручного
лота являются: невозможность измерения больших глубин;
необходимость уменьшать ход во время измерения; затраты
значительного времени на измерение; возможное изменение
длины лотлиня за счет частого намокания и высыхания.
Гирокомпас
является навигационным гироскопическим прибором, служащим
для указания направлений в море. Основным элементом всех
навигационных гироскопических приборов, применяемых для
указания направлений в море, является гироскоп.
Гироскопом
называется тело, вращающееся с большой скоростью вокруг
своей оси симметрии и подвешенное так, что ось, вокруг
которой происходит вращение, может изменять свое положение в
пространстве. Гироскоп представляет собой массивный диск,
который приводится во вращение электрическим путем, являясь
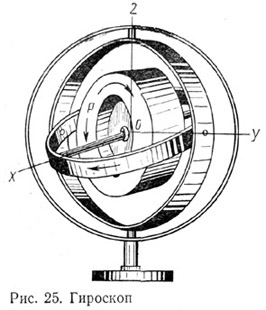
ротором электродвигателя. Гироскоп (рис. 25), подвешенный в
кардановых кольцах, может поворачиваться вокруг трех взаимно
перпендикулярных и пересекающихся в одной точке осей: х
— ось вращения самого гироскопа, или главная ось, у
— ось вращения внутреннего кольца,
z
— ось вращения наружного кольца подвеса. Углы поворота
гироскопа вокруг осей вращения будут координатами,
определяющими положение гироскопа в пространстве. При всех
возможных поворотах
гироскопа около указанных осей неподвижной остается только
одна его точка О, в которой эти оси пересекаются. Эту
точку называют точкой подвеса гироскопа.
 Гироскоп, у которого возможны вращения вокруг трех указанных
осей, называется гироскопом с тремя степенями свободы.
Гироскоп, обладающий тремя степенями свободы, у которого
центр тяжести совпадает с точкой подвеса и не подверженный
действию моментов внешних сил, называют свободным
гироскопом. Гироскоп, у которого возможны вращения вокруг трех указанных
осей, называется гироскопом с тремя степенями свободы.
Гироскоп, обладающий тремя степенями свободы, у которого
центр тяжести совпадает с точкой подвеса и не подверженный
действию моментов внешних сил, называют свободным
гироскопом.
Хотя до сих пор свободный гироскоп практически не создан,
современные гироскопы имеют настолько малые силы трения в
подвесе, что по своим свойствам приближаются к свободному
гироскопу.
На гироскоп, вращающийся с большой скоростью вокруг главной
оси х, существенно не повлияет поворот основания
карданового подвеса. Следовательно, направление, которое
было придано главной оси гироскопа при его запуске,
останется постоянным в пространстве. Это первое и основное
свойство гироскопа иногда называют «устойчивостью» главной
оси свободного гироскопа. Чем больше угловая скорость и
масса ротора, тем сильнее выражено его свойство сохранять
неизменным первоначальное направление своей оси в'
пространстве. Используя свободный гироскоп, можно проследить
за суточным вращением Земли вокруг своей оси. В связи с тем
что ось свободного гироскопа сохраняет неизменным свое
первоначальное направление в пространстве, а Земля
вращается, наблюдатель сможет увидеть, что ось гироскопа
поворачивается относительно Земли. Если главную ось
свободного гироскопа направить на какую-либо звезду, то ось
гироскопа, сохраняя направление на звезду неизменным, будет
вместе с ней изменять свое положение, поскольку плоскости
меридиана наблюдателя и истинного горизонта вращаются вместе
с Землей. Измерение положения главной оси гироскопа
относительно меридиана и горизонта называется видимым
движением.
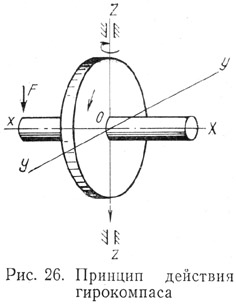 Теперь приложим к свободному гироскопу постоянную силу
F,
которая будет стремиться повернуть его вокруг горизонтальной
оси уу (рис. 26). Однако гироскоп не будет
поворачиваться вокруг оси уу, а начнет поворачиваться
вокруг оси
zz
в направлении, показанном стрелкой. Приложив к гироскопу
силу, стремящуюся повернуть его вокруг вертикальной оси
zz,
увидим, что гироскоп начнет поворачиваться вокруг
горизонтальной оси уу. Таким образом под действием
приложенной постоянной силы главная ось гироскопа будет
поворачиваться не в направлении приложенной силы (как это
было бы в случае невращающегося гироскопа), а будет
поворачиваться в плоскости, перпендикулярной линии действия
силы. Такое движение гироскопа называется прецессией
и является вторым свойством гироскопа. Теперь приложим к свободному гироскопу постоянную силу
F,
которая будет стремиться повернуть его вокруг горизонтальной
оси уу (рис. 26). Однако гироскоп не будет
поворачиваться вокруг оси уу, а начнет поворачиваться
вокруг оси
zz
в направлении, показанном стрелкой. Приложив к гироскопу
силу, стремящуюся повернуть его вокруг вертикальной оси
zz,
увидим, что гироскоп начнет поворачиваться вокруг
горизонтальной оси уу. Таким образом под действием
приложенной постоянной силы главная ось гироскопа будет
поворачиваться не в направлении приложенной силы (как это
было бы в случае невращающегося гироскопа), а будет
поворачиваться в плоскости, перпендикулярной линии действия
силы. Такое движение гироскопа называется прецессией
и является вторым свойством гироскопа.
Прецессионное движение прекращается сразу же после окончания
действия силы. Поэтому различные толчки и удары, которые
передаются от корпуса судна на гирокомпас, вызывают
прецессию гироскопа только в течение своего действия, а так
как оно кратковременно, то ось гироскопа практически
остается в меридиане. Следовательно, толчки и удары не
оказывают на гирокомпас почти никакого влияния. Свободный
гироскоп не может быть использован как курсоуказатель,
потому что его ось непрерывно уходит от меридиана и
одновременно наклоняется к плоскости горизонта.
Для превращения свободного гироскопа в гирокомпас
используется свойство прецессии. Гироскопу необходимо
сообщить направляющий момент, который удерживал бы его
главную ось в плоскости меридиана так же, как магнитный
момент стрелок магнитного компаса удерживает картушку
компаса в плоскости компасного меридиана.
Лишив гироскоп возможности поворачиваться вокруг оси уу,
мы получим вместо свободного гироскопа связанный. В этом
случае гироскоп будет вынужден поворачиваться вместе с
Землей вокруг оси уу, иными словами совершать
вынужденную прецессию. Следовательно, в теле ротора
гироскопа появится вращающий момент, который заставит
гироскоп повернуться вокруг оси так, чтобы его главная ось
совместилась с меридианом наблюдателя.
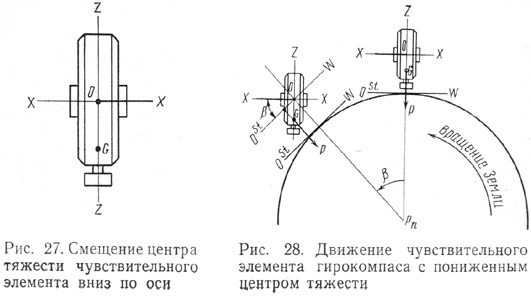 Подвесим к нижней части гирокамеры гироскопа груз (рис. 27),
в результате чего центр тяжести
G
гирокамеры окажется смещенным относительно точки подвеса
О. Допустим, что гироскоп находится на экваторе, главная
ось гироскопа хх в данный момент горизонтальна и
выведена из меридиана на угол, равный 90°, т. е. расположена
в направлении линии
OstW
(рис. 28). Подвесим к нижней части гирокамеры гироскопа груз (рис. 27),
в результате чего центр тяжести
G
гирокамеры окажется смещенным относительно точки подвеса
О. Допустим, что гироскоп находится на экваторе, главная
ось гироскопа хх в данный момент горизонтальна и
выведена из меридиана на угол, равный 90°, т. е. расположена
в направлении линии
OstW
(рис. 28).
В этом положении момент силы тяжести р относительно
точки подвеса О, называемый маятниковым моментом,
равен нулю, так как направление силы тяжести проходит
через точку подвеса. Затем вследствие вращения Земли
плоскость истинного горизонга повернется на некоторый угол
β (восточная половина горизонта опустится), а ось
хх, сохраняя первоначальное направление, составит
с горизонтом также угол β. При этом сила тяжести р,
направленная всегда по отвесной линии, создаст момент
относительно оси уу, под действием которого гироскоп
начнет совершать прецессионное движение вокруг оси
zz
к меридиану, и его ась в конечном итоге установится в
меридиане. Такой гироскоп с пониженным центром тяжести
становится указателем меридиана, т. е. чувствительным
элементом гирокомпаса. Однако после того как гироскоп
прецессионным движением устанавливается в плоскости
меридиана, его главная ось будет совершать незатухающие
колебания вокруг истинного меридиана; таким прибором
пользоваться нельзя. Чтобы гирокомпасом можно было
пользоваться в судовождении, необходимо, чтобы главная ось
чувствительного элемента постоянно находилась в плоскости
меридиана. Для приведения гирокомпаса в меридиан, т. е. для
гашения незатухающих колебаний, имеется специальное
устройство — жидкостный успокоитель.
 У гирокомпаса, как и у всякого прибора, имеются погрешности,
которые делятся на три категории: конструктивные,
инструментальные и ошибки наблюдателя. Вследствие наличия
погрешностей гирокомпаса гирокомпасный меридиан не совпадает
с истинным меридианом на угол, называемый общей поправкой
гирокомпаса —
∆ГК.
В связи с тем, что общая поправка не является величиной
постоянной, судоводитель обязан систематически определять
общую поправку гирокомпаса навигационными, астрономическими
и радионавигационными способами. У гирокомпаса, как и у всякого прибора, имеются погрешности,
которые делятся на три категории: конструктивные,
инструментальные и ошибки наблюдателя. Вследствие наличия
погрешностей гирокомпаса гирокомпасный меридиан не совпадает
с истинным меридианом на угол, называемый общей поправкой
гирокомпаса —
∆ГК.
В связи с тем, что общая поправка не является величиной
постоянной, судоводитель обязан систематически определять
общую поправку гирокомпаса навигационными, астрономическими
и радионавигационными способами.
Рассмотрим основные узлы гирокомпаса типа «Курс»,
устанавливаемого на судах морского флота. Главным прибором
гирокомпаса является основной компас (рис. 29), в котором
расположены чувствительный элемент — гиросфера, следящая
сфера, внешние или неподвижные части гирокомпаса.
Гиросфера
(рис. 30) предназначена для определения линии
NS,
которая указывает гирокомпасный меридиан. Гиросфера
представляет собой герметическую сферу, внутри которой
расположены два гиромотора, жидкостный успокоитель, реле
выключателя затухания и катушка электромагнитного дутья.
Корпус гиросферы состоит из двух латунных полусфер,
облицованных снаружи эбонитом. Гироскопы или гиромоторы
являются трехфазными электрическими двигателями с частотой
вращения 20000 об/мин. Гиромоторы установлены на специальном
кронштейне, который крепится к нижней полусфере.
Жидкостный успокоитель служит для гашения незатухающих
колебаний чувствительного элемента.
Катушка электромагнитного дутья уложена в нижней части
гиросферы. При прохождении тока, вокруг катушки образуются
переменные магнитные поля, которые препятствуют опусканию
гиросферы, поддерживая гиросферу на плаву в центре следящей
сферы. Центр тяжести
 гиросферы ниже ее геометрического
центра примерно на 6 мм. Диаметр гиросферы равен 252 мм. Для
подводки электрического питания к гиросфере на ее
поверхности имеются графитно-эбонитовые электроды: два
полярных, широкий экваториальный полупояс, четыре узких и
небольшой круглый электрод на экваторе гиросферы. Гиросфера
помещается в следящую сферу и вместе с ней полностью
погружается в поддерживающую токопроводящую жидкость,
налитую в резервуар. Следящая сфера негерметична, и
гиросфера плавает в ней. гиросферы ниже ее геометрического
центра примерно на 6 мм. Диаметр гиросферы равен 252 мм. Для
подводки электрического питания к гиросфере на ее
поверхности имеются графитно-эбонитовые электроды: два
полярных, широкий экваториальный полупояс, четыре узких и
небольшой круглый электрод на экваторе гиросферы. Гиросфера
помещается в следящую сферу и вместе с ней полностью
погружается в поддерживающую токопроводящую жидкость,
налитую в резервуар. Следящая сфера негерметична, и
гиросфера плавает в ней.
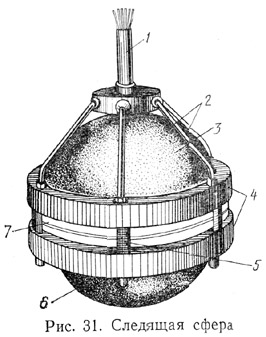
Поддерживающая жидкость представляет собою смесь
дистиллированной воды, глицерина, буры и формалина. Следящая
сфера (рис. 31) служит для обеспечения подвеса
чувствительного элемента и подведения к нему электрического
питания. Она состоит из двух алюминиевых 3 и 6
чаш, держателя 1 со стержнями 2, двух
токопроводящих колец 4 с электродами, эбонитовых
колодок 5 и смотровых застекленных окон 7,
служащих для наблюдения за гиросферой. Составной частью
следящей системы является азимут-мотор, который служит для
согласования следящей сферы с гиросферой.
К внешним или неподвижным частям гирокомпаса относятся
нактоуз с кардановым подвесом, резервуар с поддерживающей
жидкостью, «стол» с приборами системы охлаждения,
контрольными приборами и корректором скоростной погрешности.
Питание гирокомпаса осуществляется специальным
агрегатом-преобразователем.
Гирокомпас по сравнению с магнитным компасом обладает
следующими преимуществами: магнитные поля не влияют на
работу гирокомпаса и поправка его постоянна на всех курсах;
он более устойчив в меридиане; его можно использовать для
подключения необходимого числа репитеров и других приборов;
он обеспечивает более точное указание курса. Основной
недостаток гирокомпаса — сложность конструкции и потребность
в электрическом токе.
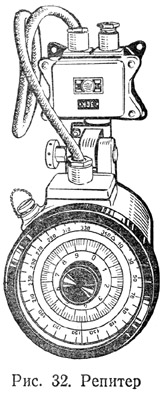 Репитер
(рис. 32) — прибор, повторяющий показания основного прибора
гирокомпаса. Репитеры устанавливают в штурманской и рулевой
рубках, на крыльях мостика, в каюте капитана и в других
местах судна, где необходимо иметь прибор курсоуказания. Репитер
(рис. 32) — прибор, повторяющий показания основного прибора
гирокомпаса. Репитеры устанавливают в штурманской и рулевой
рубках, на крыльях мостика, в каюте капитана и в других
местах судна, где необходимо иметь прибор курсоуказания.
Репитер подвешивают в кардановом подвесе на специальной
колонке, называемой пелорусом. Настенный репитер (в каюте
капитана, штурманской рубке) крепится на специальном
кронштейне на переборке. Репитер представляет собой
водонепроницаемый металлический: корпус, закрытый сверху
стеклом. Внутри корпуса находится принимающий электромотор.
Принимая показания датчика основного компаса, ротор
электромотора при помощи зубчатой передачи разворачивает
картушки внутреннего точного и наружного грубого отсчета.
Картушка грубого отсчета разбита на 360° с ценой деления Г и
оцифрована через 10°. Картушка точного отсчета разбита на
10° с ценой деления 0,1°.. Над картушками закреплена
курсовая черта.
Рулевой матрос удерживает судно на курсе по картушке точного
отсчета. Если судно следует курсом 275°, курсовая черта
будет находиться против деления 275° картушки грубого
отсчета и против деления 5° картушки точного отсчета, так
как последняя показывает только единицы и не показывает
десятки и сотни градусов.
При повороте судна на новый курс необходимо следить за
поворотом судна по картушке грубого отсчета и после прихода
на курс подправить его по картушке точного отсчета. Для
снятия отсчета курса по репитеру с картушки грубого отсчета
снимают целые сотни и десятки градусов, а по картушке
точного отсчета снимают единицы и десятые доли градуса. На
кольцевом ободе репитера нанесен азимутальный круг для
взятия курсовых углов. Согласование показаний репитера с
основным компасом производят специальным ключом, вставляемым
в отверстие сбоку корпуса репитера.
Курсограф
(рис. 33) — прибор, предназначенный для непрерывной
автоматической записи курса в течение рейса, а также для
контроля за работой рулевого матроса. Лента курсографа с
записью курса является контрольным документом при разборе
аварий.
Показания основного компаса передаются на репитерный
моторчик 1 курсографа, который приводит в движение
два пера 2, записывающих курс судна на бумажной ленте
3, разделенной вертикальными линиями на 90° через
1°.и
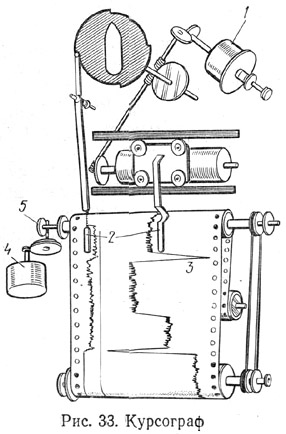 с четырьмя шкалами-0-90°, 90-180°, 180-270°, 270-360°.
Для того чтобы прочесть запись курса, сначала по записи
левого (четвертного) пера определяют четверть, в которой
расположен курс судна, затем со шкалы, соответствующей
четверти, снимают курс, записанный правым (курсовым пером).
Так, например, если левое перо пишет в третьей графе, а
правое перо показывает курс 63°, то действительный курс
судна будет 180+63 — 243°. с четырьмя шкалами-0-90°, 90-180°, 180-270°, 270-360°.
Для того чтобы прочесть запись курса, сначала по записи
левого (четвертного) пера определяют четверть, в которой
расположен курс судна, затем со шкалы, соответствующей
четверти, снимают курс, записанный правым (курсовым пером).
Так, например, если левое перо пишет в третьей графе, а
правое перо показывает курс 63°, то действительный курс
судна будет 180+63 — 243°.
Электродвигатель времени 4 при помощи лентопротяжного
механизма 5 вращает ведущий валик, на который
наматывается лента 3 с делениями 2 ч от 0 до 24 ч.
Зная, что отрезок ленты между двумя поперечными линиями на
ленте проходит за 10 мин, можно определить время в момент
снятия курса. Перед включением показания курсографа
необходимо согласовать с основным гирокомпасом и на ленте
курсографа проставить дату и судовое время.
 Авторулевой —
прибор, предназначенный .для автоматического управления
судовым рулевым приводом и, следовательно, автоматически,
без участия рулевого матроса, удерживающий судно на заданном
курсе. Авторулевой также производит повороты и изменения
курса на заданную величину. В соответствии с полученным от
датчика авторулевого сигналом рулевой привод совершает
перекладку руля на определенный угол в сторону,
противоположную уходу судна с курса. Как только судно начнет
возвращаться на заданный курс, авторулевой отведет руль,
затем, удерживая его, переложит руль в противоположную
сторону. Основной режим работы авторулевого —
автоматический. Авторулевой —
прибор, предназначенный .для автоматического управления
судовым рулевым приводом и, следовательно, автоматически,
без участия рулевого матроса, удерживающий судно на заданном
курсе. Авторулевой также производит повороты и изменения
курса на заданную величину. В соответствии с полученным от
датчика авторулевого сигналом рулевой привод совершает
перекладку руля на определенный угол в сторону,
противоположную уходу судна с курса. Как только судно начнет
возвращаться на заданный курс, авторулевой отведет руль,
затем, удерживая его, переложит руль в противоположную
сторону. Основной режим работы авторулевого —
автоматический.
Обычно в нормальных условиях плавания рыскливость судна
вправо и влево бывает на одно и то же число градусов. Но в
других условиях плавания бывают случаи несимметричного
рысканья. Так, в штормовую погоду при качке на волнении,
когда судно постоянно рыскает в каждую сторону на разное
число градусов, у авторулевого предусмотрена регулировка его
чувствительности на изменение курса от рысканья. Подобная
регулировка позволяет судну в штормовую погоду совершать
небольшие отклонения от курса.
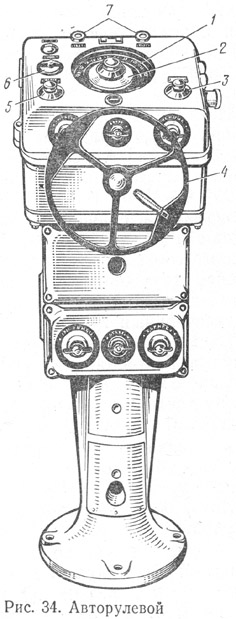
Наиболее распространенный тип авторулевого, устанавливаемого
на судах среднего и крупного тоннажа, — автоматический
бесконтактный рулевой (АБР). Основной прибор АБР — пульт
управления (рис. 34) —устанавливается в рулевой рубке.
Пульт управления содержит все основные элементы
автоматического устройства и регулирования. На верхней
крышке в центре пульта расположен репитер гирокомпаса 1
и аксиометр 2 заданного положения руля. Слева
расположен переключатель видов управления с двумя
положениями: «Автомат» и «Следящее» 6 и рукоятка
регулятора чувствительности 5. Справа расположена
рукоятка регулятора тахометра 3. Кроме того, на
крышке пульта расположены две сигнальные лампы 7,
показывающие режим работы авторулевого. Спереди пульта
имеется штурвал 4, предназначенный для перекладки
руля при работе авторулевого в следящем режиме и для
управления изменением курса при работе в режиме
автоматического управления.
В комплект авторулевых типа АБР входят два выносных поста
управления (ВПУ), которые устанавливаются на крыльях
мостика. ВПУ дают возможность непосредственно с мостика
осуществлять резкие повороты судна в случае необходимости.
После прекращения действия ВПУ судно автоматически выходит
на ранее заданный курс.
Автоматические рулевые имеют ряд преимуществ по сравнению с
ручным управлением. Авторулевой обеспечивает более точное
удержание на курсе в различных условиях плавания и уменьшает
величину и число перекладок руля, что дает заметное
сокращение пути. Авторулевые значительно облегчают труд
матросов.
В последнее время на транспортных судах устанавливают новые
типы авторулевых АРМ-2 для малых и АТР для средне- и
крупнотоннажных судов.
Эхолот—навигационный
гидроакустический лот, которым измеряют глубину до 2 тыс. м.
Принцип действия эхолота основан на измерении времени
прохождения ультразвукового импульса от вибратора-излучателя
до морского дна и обратно до вибратора-приемника. В
вибраторах используются ферромагнитные материалы (железо,
кобальт, никель), которые обладают свойством
магнитострикционного эффекта. Этот эффект заключается в
деформации ферромагнитных материалов при их намагничивании.
В вибраторе-приемнике используется обратный
магнитострикционный эффект, который состоит в изменении
магнитного поля в ферромагнитных намагниченных материалах
при их деформации.
 Вибраторы
эхолотов состоят из' пакета тонких никелевых пластин с
намотанной на них электрической обмоткой. Вибраторы
эхолотов состоят из' пакета тонких никелевых пластин с
намотанной на них электрической обмоткой.
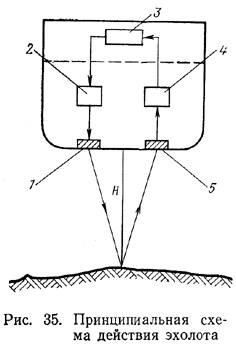
Рассмотрим принципиальную схему действия эхолота (рис. 35).
Электродвигатель вращает с равномерной скоростью диск
указателя глубин 3 с неоновой лампочкой. В тот
момент, когда на диске указателя глубин неоновая лампочка
пройдет через нулевое деление шкалы глубин, кулачковый
контакт замкнет электроцепь, состоящую из посылочного
конденсатора 2, заряженного до напряжения 1500 В и
обмоток вибратора-излучателя 1. При этом конденсатор
разрядится, и ток разряда, протекая по обмоткам
вибратора-излучателя, вызовет появление переменного
электромагнитного поля в никелевых пластинах пакета
вибратора. Явление магнитострикционного эффекта вызовет
колебания излучающей поверхности вибратора и в виде
ультразвукового импульса дойдет до морского дна и, частично
отразившись, вернется на вибратор-приемник 5. Попав
на пакет вибратора-приемника, отраженный импульс вызовет его
колебания и, следовательно, изменение остаточного магнитного
поля. Изменение магнитного поля создаст в обмотке вибратора
незначительную переменную электродвижущую силу. Возникшее
таким образом напряжение поступает в усилитель 4, и
затем усиленный импульс подается на неоновую лампочку,
вызывая ее кратковременное зажигание.
За промежуток времени между посылкой и приемом сигнала диск
с неоновой лампочкой повернется на угол, пропорциональный
времени прохождения сигнала.
Установленная перед вращающимся диском шкала указателя
глубин отградуирована в метрах. Таким образом, деление
шкалы, против которого произойдет вспышка неоновой лампочки,
покажет глубину под килем судна. Оба вибратора смонтированы
в днище судна.
На современных транспортных судах устанавливаются
навигационные магнитострикционные эхолоты НЭЛ-5.
Погрешность при измерении глубин свыше 200 м не более ±2%.
Указатель глубин управляет посылкой ультразвуковых
импульсов, является визуальным индикатором измеряемых глубин
и имеет два диапазона глубин: 0—100 и 0—2000 м. На шкале
первого диапазона каждое деление соответствует 0,5 м, а на
шкале второго—10 м. При измерении малых глубин эхолот
включают на первый диапазон, а при измерении больших глубин
— на второй.
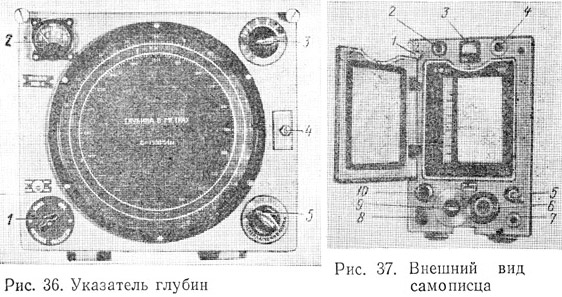 На
корпусе указателя глубин (рис. 36) расположены рукоятки
выключателя 1, переключателя диапазонов 5,
регулятора усиления 3, выключателя 4 гашения
нулевой вспышки неоновой лампочки и вольтметр 2,
контролирующий рабочее напряжение. Помимо указателя глубин,
эхолот НЭЛ-5 имеет самописец, который автоматически и
непрерывно записывает измеряемые глубины на специальную
бумажную ленту. На
корпусе указателя глубин (рис. 36) расположены рукоятки
выключателя 1, переключателя диапазонов 5,
регулятора усиления 3, выключателя 4 гашения
нулевой вспышки неоновой лампочки и вольтметр 2,
контролирующий рабочее напряжение. Помимо указателя глубин,
эхолот НЭЛ-5 имеет самописец, который автоматически и
непрерывно записывает измеряемые глубины на специальную
бумажную ленту.
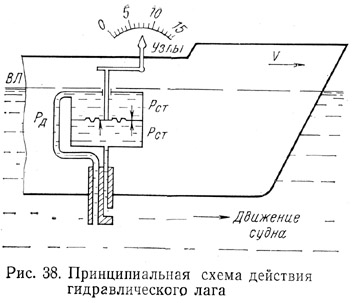
На лицевой стороне крышки самописца (рис. 37) расположены
два предохранителя 1, вольтметр 3, лампочка
2, сигнализирующая о включении в работу указателя,
выключатель самописца 10, переключатель диапазонов
9, рукоятка 6 регулятора усиления, выключатель
8 гашения нулевой вспышки, кнопки 7 оперативных обмоток,
тумблер 5 и лампа 4 контроля скорости вращения
двигателя самописца. Одновременная работа указателя глубин и
самописца невозможна.
Пуск эхолота производится следующим образом. При питании от
сети переменного тока выключатель фильтра ставят в положение
«Включено». Для остановки эхолота требуется вывести
регулятор усиления и выключатель указателя глубин самописца
или поставить в положение «Выключено».
Измерение глубин производится следующим образом. После пуска
эхолота переключатель шкал устанавливают на диапазон
измеряемых глубин. Если приблизительная глубина неизвестна,
измерение начинают с большего диапазона. При измерении малых
глубин включается тумблер гашения нуля. Отсчет глубин на
ленте самописца производится по верхней кромке записи.
В последнее время на некоторых судах устанавливают
пьезоэлектрические эхолоты НЭЛ-10, у которых в качестве
колебательной системы вибраторов используется призма
титаната бария.
Гидравлические лаги
— приборы, которые предназначены для измерения скорости
судна и пройденного расстояния относительно воды, почему они
и являются не абсолютными, а относительными.
На судах морского флота широкое распространение получили
гидравлические лаги ЛГ-2 и МГЛ-25.
Принцип действий гидравлического лага основан на измерении
скоростного напора встречного потока, обтекающего судно при
его движении.
В движущейся жидкости наблюдаются статическое и динамическое
давления. Причиной статического давления является ее сжатие.
Динамическое давление зависит от скорости течения жидкости.
 Современный
гидравлический лаг работает следующим образом (рис. 38). В
корпусе судна, ниже ватерлинии, устанавливается
герметическая камера, которая разделена на нижнюю и верхнюю
полости подвижной диафрагмой. Отверстие, которое передает
статическое давление, соединено с верхней камерой, отверстие
полного давления — с нижней полостью. Пока судно не имеет
хода, давление воды на верхнюю и нижнюю полости мембранного
устройства одинаково и равно статическому давлению воды, в
результате чего диафрагма будет находиться в нулевом
положении. Когда судно получит движение в приемной трубке,
кроме статического давления, появится динамическое
(скоростной напор), и диафрагма при этом начнет
приподниматься. Современный
гидравлический лаг работает следующим образом (рис. 38). В
корпусе судна, ниже ватерлинии, устанавливается
герметическая камера, которая разделена на нижнюю и верхнюю
полости подвижной диафрагмой. Отверстие, которое передает
статическое давление, соединено с верхней камерой, отверстие
полного давления — с нижней полостью. Пока судно не имеет
хода, давление воды на верхнюю и нижнюю полости мембранного
устройства одинаково и равно статическому давлению воды, в
результате чего диафрагма будет находиться в нулевом
положении. Когда судно получит движение в приемной трубке,
кроме статического давления, появится динамическое
(скоростной напор), и диафрагма при этом начнет
приподниматься.
Разность динамического (полного) давления в приемной трубке
и статического, приложенная к диафрагме, заставит двигаться
соединенный с ней шток со стрелкой указателя, которая
соответственно отклоняется. По величине отклонения стрелки
судят о величине скорости судна.
При плавании на мелководье и во льдах выстреливаемые за
обшивку корпуса судна трубки часто повреждаются. Это вызвало
необходимость создания так называемого штевневого лага.
У штевневого лага полное давление передается через
специальное отверстие в форштевне, а статическое — через
отверстия в бортах или днище судна.
Указатель скорости и пройденного расстояния размещается в
центральном приборе лага, устанавливаемом обычно в машинном
отделении.
Показания скорости и пройденного расстояния передаются на
репитеры лага, которые помещают в штурманской, рулевой
рубках и в других помещениях судна. Лаг МГЛ-25 позволяет
измерять скорость до 25 уз.
К радионавигационным приборам относятся радиолокационные
станции, радиопеленгаторы, а также приемоиндикаторы
радионавигационных систем.
Радиолокационные станции
(РЛС) предназначены для обнаружения местонахождения
различных объектов и наблюдения за окружающей надводной
обстановкой в условиях плохой видимости.
В РЛС используется явление отражения радиоволн от различных
объектов, расположенных на пути их распространения, таким
образом, в радиолокации используется явление эха. РЛС
содержит передатчик, приемник, антенно-волноводное
устройство, индикатор с экраном для визуального наблюдения
эхо-сигналов.
Принцип работы РЛС следующий. Передатчик станции
вырабатывает мощные высокочастотные импульсы
электромагнитной энергии, которые с помощью антенны
посылаются в пространство узким лучом. Отраженные от
какого-либо объекта (судна, высокого берега и т. п.)
радиоимпульсы возвращаются в виде эхо-сигналов к антенне и
поступают в приемник. По направлению узкого
радиолокационного луча, который в данный момент отразился от
объекта, можно определить пеленг или курсовой угол объекта.
Измерив, промежуток времени между посылкой импульса и
приемом отраженного сигнала, можно получить расстояние до
объекта. Так как при работе РЛС антенна вращается,
излучаемые импульсные колебания охватывают весь горизонт.
Поэтому на экране индикатора судовой РЛС создается
изображение окружающей судно обстановки. Принятые
эхо-сигналы после преобразования и усиления в приемнике
поступают в индикатор, снабженный электроннолучевой трубкой.
Экран электроннолучевой трубки покрыт особым составом,
обладающим свойством послесвечения, поэтому эхо-сигналы,
возникающие на экране индикатора, угасают постепенно.
Центральная светящаяся точка на экране индикатора РЛС
отмечает место судна, а идущая от этой точки светящаяся
линия показывает курс судна.
 Изображение
различных объектов на экране индикатора может быть
ориентировано относительно диаметральной плоскости судна
(стабилизация по курсу) или относительно истинного меридиана
(стабилизация по норду). Направления на объекты определяются
по азимутальному кругу соответственно ориентированного или
по курсу, или по норду. В последнем случае азимутальный круг
должен быть связан с репитером гирокомпаса. По светящимся на
экране индикатора градуированным неподвижным кольцам
дальности определяется расстояние до нужного объекта,
который изображается светящимся пятном, если это одиночный
предмет (судно, маяк), или волнистой линией (береговая черта
и т. д.). Для точного измерения расстояния имеется
дальномерное устройство с подвижным кругом дальности. Изображение
различных объектов на экране индикатора может быть
ориентировано относительно диаметральной плоскости судна
(стабилизация по курсу) или относительно истинного меридиана
(стабилизация по норду). Направления на объекты определяются
по азимутальному кругу соответственно ориентированного или
по курсу, или по норду. В последнем случае азимутальный круг
должен быть связан с репитером гирокомпаса. По светящимся на
экране индикатора градуированным неподвижным кольцам
дальности определяется расстояние до нужного объекта,
который изображается светящимся пятном, если это одиночный
предмет (судно, маяк), или волнистой линией (береговая черта
и т. д.). Для точного измерения расстояния имеется
дальномерное устройство с подвижным кругом дальности.
«Дальность видимости» РЛС достигает несколько десятков миль.
Однако дальность обнаружения зависит от отражательной
способности объектов. На дальность обнаружения РЛС, кроме
технических данных станции, влияют гидрометеорологические
факторы.
Судовые РЛС позволяют осуществлять плавание в узкостях,
расхождение судов и определение места судна по береговым
ориентирам или радиолокационным маякам в условиях плохой
видимости.
Судовые РЛС позволяют за короткий промежуток времени
определить курс и скорость встречного судна и избежать,
таким образом, столкновения.
Однако РЛС имеет ряд недостатков: ограниченная дальность
действия; значительная «мертвая зона», т. е. минимальная
дальность обнаружения, которая составляет от 30 до 120 м по
расстоянию и 1,8—1,1° по азимуту; сложность устройства РЛС
затрудняет ремонт в судовых условиях.
В настоящее время на советских судах широко используются РЛС
типа «Дон», Донец» и «Лоция». Получила распространение
автоматизированная; РЛС «Океан» (рис. 39). Для обеспечения
безопасности плавания в портовых водах, где наблюдается
большое скопление судов, используются береговые
радиолокационные станции (БРЛС). С помощью БРЛС
осуществляют лоцманскую проводку судов, входящих и выходящих
из порта, в условиях ограниченной видимости. Лоцман,
осуществляющий проводку, получает от БРЛС данные о
местонахождении судна. В случае большой протяженности
фарватера устанавливается ряд БРЛС, которые обеспечивают
непрерывную проводку судов. Точность проводки по БРЛС
довольно высокая, позволяющая обнаружить уход судна с оси
фарватера на расстояние до 10 м.
Радиопеленгатор
является радиоприемным устройством, предназначенным для
определения направления на передающую радиостанцию. Принцип
действия радиопеленгатора основан на свойстве направленности
рамочной антенны.
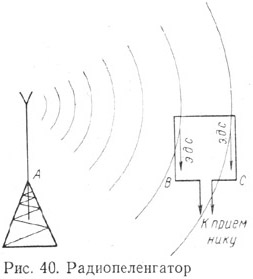
Электромагнитная волна от излучателя А (рис. 40),
дойдя до рамки пеленгатора, встретит провод В, в
котором появится электродвижущая сила, (э. д. с.), затем —
провод С, где появится э. д. с., но уже меньшая по
величине. Если соединить вертикальные проводники
горизонтальными и подвести к приемнику, то на его зажимах
появится напряжение, равное разности э. д. с. в обоих
вертикальных проводниках. Максимальной величина принимаемого
приемником сигнала будет в том случае, когда плоскость рамки
расположена в направлении передающей станции под углом,
равным 0 или 180°. Когда плоскость рамки развернется на угол
90 или 270° по отношению к распространению радиоволны, э. д.
с. будет одинаковой в обоих проводниках В и С,
следовательно, на входе приемника результирующая э. д. с.
будет равна нулю. В этом случае говорят, что отмечается
минимум сигнала.
Определение направления осуществляется на слух по минимуму
слышимости пеленгуемых сигналов радиомаяка путем поворота
рамки или роторной катушки гониометра в радиопеленгаторах с
неподвижными рамками. Получаемые отсчеты представляют собой
радиокурсовой угол на радиомаяк. Исправляя радиокурсовой
угол поправкой на так называемую радиодевиацию, находят
курсовой угол. Суммируя курсовой угол и истинный курс судна,
получают истинный пеленг на радиомаяк. Получив таким образом
два или три пеленга радиомаяков и проложив полученные
пеленги на навигационной карте, определяют место судна.
 Радиодевиацией
называется отклонение радиопеленга от истинного. Появление
радиодевиации обусловлено влиянием полей вторичного
излучения от корпуса такелажа и надстроек судна. Величина
радиодевиации зависит от радиокурсового угла и длины
приходящей радиоволны. Различают постоянную, полукруговую и
четвертную радиодевиации. Радиодевиацией
называется отклонение радиопеленга от истинного. Появление
радиодевиации обусловлено влиянием полей вторичного
излучения от корпуса такелажа и надстроек судна. Величина
радиодевиации зависит от радиокурсового угла и длины
приходящей радиоволны. Различают постоянную, полукруговую и
четвертную радиодевиации.
Радиодевиация изменяется от расположения стального такелажа
судна, положения грузовых стрел, осадки и наличия крена
судна, а также наличия металлических грузов в трюмах и на
палубе. Радиодевиация может достигать величины нескольких
десятков градусов.
Существуют механические и электрические способы ее
компенсации. Однако компенсировать ее полностью не всегда
удается. Остаточная радиодевиация не должна превышать 6—8°.
Определение остаточной радиодевиации нужно производить не
реже одного раза в год.
Точность радиопеленгования обусловлена целым рядом факторов.
Важнейшие ошибки при радиопеленговании следующие:
ошибка угла молчания — полезный сигнал заглушается раньше,
чем его слышимость станет минимальной;
ошибка в снятии отсчета радиопеленга зависит от личных
качеств наблюдателя;
антенный эффект выражается в расплывчивости минимума;
ночной эффект — в радиопеленгаторе возникают нерегулярные,
периодические изменения слышимости, изменения направления
пеленгов;
береговой эффект наблюдается при переходе радиоволны через
границу раздела воды и суши;
ошибка в расчете радиопеленга в обычных условиях может
достигать ±1,0°.
Радиопеленгаторы являются радионавигационными системами
ближней навигации и используются для определения места судна
в море, в условиях плохой видимости, а также для плавания
навстречу судну, подающему радиосигналы.
Для определения места используются специальные
радиопередающие станции, называемые радиомаяками.
Радиомаяки размещаются на побережье или на плавучих маяках и
работают по специальной программе, указываемой в
навигационных справочниках для различных районов
мореплавания. Судовые радиопеленгаторы разделяются на три
основных типа: радиопеленгаторы со слуховой индикацией, с
визуальной индикацией пеленгуемых радиосигналов и
автоматические.
Радиопеленгатор содержит в своем составе поворотную рамочную
антенну или две неподвижные взаимно перпендикулярные
рамочные антенны и радиоприемник.
 Наиболее распространенными на судах являются
радиопеленгаторы гониометрического типа СРП-5 (рис. 41) с
неподвижными рамками. Этот радиопеленгатор имеет две шкалы.
По внутренней неподвижной шкале определяется радиокурсовой
угол, а по внешней подвижной шкале, связанной с
гирокомпасом, — радиопеленг. Судовые радиопеленгаторы с
визуальной индикацией бывают двухканальные с
электроннолучевой трубкой и автоматические со следящей
системой. Наибольшее распространение на транспортных судах
получили двухканальные визуальные радиопеленгаторы (ДВРП),
которые состоят из двух неподвижных взаимно перпендикулярных
рамок, двухканального радиоприемника и электроннолучевой
трубки. После настройки приемника на пеленгуемый радиомаяк
на экране электроннолучевой трубки появляется светящаяся
линия, указывающая радиокурсовой угол или радиопеленг. Наиболее распространенными на судах являются
радиопеленгаторы гониометрического типа СРП-5 (рис. 41) с
неподвижными рамками. Этот радиопеленгатор имеет две шкалы.
По внутренней неподвижной шкале определяется радиокурсовой
угол, а по внешней подвижной шкале, связанной с
гирокомпасом, — радиопеленг. Судовые радиопеленгаторы с
визуальной индикацией бывают двухканальные с
электроннолучевой трубкой и автоматические со следящей
системой. Наибольшее распространение на транспортных судах
получили двухканальные визуальные радиопеленгаторы (ДВРП),
которые состоят из двух неподвижных взаимно перпендикулярных
рамок, двухканального радиоприемника и электроннолучевой
трубки. После настройки приемника на пеленгуемый радиомаяк
на экране электроннолучевой трубки появляется светящаяся
линия, указывающая радиокурсовой угол или радиопеленг.
Кроме радиопеленгаторов, для определения места судна в море
также используются разностно-дальномерные
радионавигационные системы (РНС) дальней навигации.
В основе принципа работы этих РНС лежит метод измерения
разности расстояний до береговых радиостанций. В зависимости
от применяемого способа определения разности расстояний РНС
бывают импульсные, фазовые и импульсно-фазовые. К импульсным
и имлульсно-фазовым системам относятся: «Лоран-А» и
«Лоран-С» (от английского
Long Range Novigation).
Большое распространение получила РНС «Лоран-А». Зона
действия этой системы охватывает три четверти водной
поверхности северного полушария при дальности действия около
600 миль днем и до 1400 миль ночью.
 Береговой комплекс РНС «Лоран-А» состоит из одной ведущей и
двух или трех ведомых станций, которые расположены на
расстоянии около 400 миль друг от друга. Ведущая станция
контролирует и задает цикл работы. Ведомая станция, получив
импульсы от ведущей, синхронизирует по ним свою работу и
начинает излучать свои импульсы. Определение места судна с
помощью импульсной системы «Лоран-А» основано на измерении
на судне с помощью приемоиндикатора промежутка времени между
моментами приема импульсных сигналов от ведущей и ведомой
станций. По полученным данным, с помощью специальной карты
или по специальным таблицам, находят линию положения
—гиперболу. Определив по двум парам станций две такие линии
положения (гиперболы), находят место судна в точке
пересечения гипербол. На судах морского флота применяются
приемоиндикаторы КПИ-4. Береговой комплекс РНС «Лоран-А» состоит из одной ведущей и
двух или трех ведомых станций, которые расположены на
расстоянии около 400 миль друг от друга. Ведущая станция
контролирует и задает цикл работы. Ведомая станция, получив
импульсы от ведущей, синхронизирует по ним свою работу и
начинает излучать свои импульсы. Определение места судна с
помощью импульсной системы «Лоран-А» основано на измерении
на судне с помощью приемоиндикатора промежутка времени между
моментами приема импульсных сигналов от ведущей и ведомой
станций. По полученным данным, с помощью специальной карты
или по специальным таблицам, находят линию положения
—гиперболу. Определив по двум парам станций две такие линии
положения (гиперболы), находят место судна в точке
пересечения гипербол. На судах морского флота применяются
приемоиндикаторы КПИ-4.
Принцип действия судового приемоиндикатора состоит в
следующем. Сигналы береговых станций поступают в приемник,
усиливаются, детектируются и поступают на индикатор, в
котором производится непрерывное автоматическое измерение
временного интервала между двумя сигналами в микросекундах.
Включение приемоиндикатора и измерение запаздывания
импульсов двух пар станций «Лоран-А» производится в
определенной последовательности в соответствии с инструкцией
по эксплуатации приемоиндикатора.
Комплект судового приемоиндикатора КПИ-4 состоит из
приемника, принимающего и усиливающего сигналы береговых
станций; индикатора, отсчитывающего разность времени прихода
сигналов; блока питания и слежения.
К разностнодальномерным системам относится также и фазовая
РНС «Декка-навигатор». Принцип работы РНС «Декка-навигатор»
основан на измерении на судне разности фаз электромагнитных
колебаний, приходящих от двух береговых станций. Комплекс
РНС «Декка-навигатор» состоит из цепочки береговых станций,
судового приемоиндикатора и специальных радионавигационных
карт, на которых нанесены сетки гиперболических линий
положений. В цепочку РНС «Декка-навигатор» входят три, чаще
четыре береговые станции, одна из которых ведущая, а
остальные ведомые. Для определения места судна по сигналам
фазовой РНС «Декка-навигатор» предназначен приемоиндикатор
«Пирс-1» (рис. 42).
В комплект приемоиндикатора «Пирс-1» входят приемник,
индикатор, противолокационный фильтр, прибор обнаружения
неисправностей.
|

